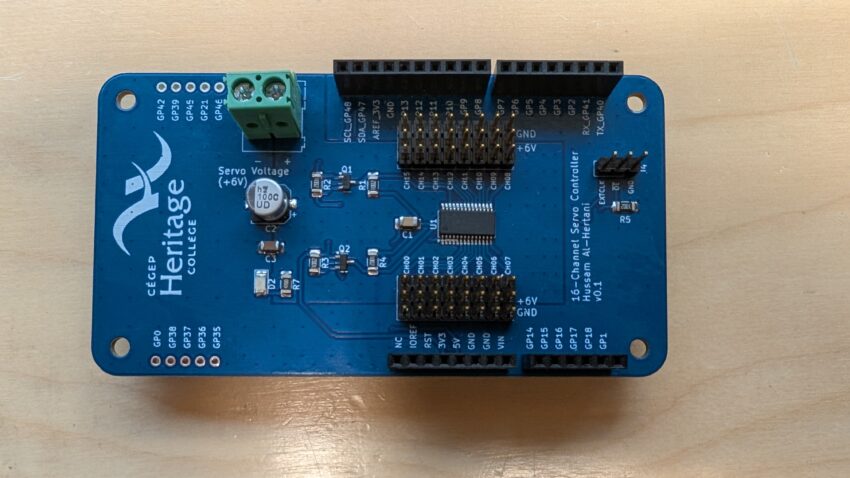
The 16-channel servo motor controller is yet another IOTIS daughterboard reference design. It is based around the PCA9685 Pulse Width Modulation (PWM) controller integrated circuit (I.C.). The PCA9685 has 12-bit resolution. It can control up to 16 LEDs. Thanks to its ability to output a variable frequency ranging from 1526Hz to 24Hz, it can also…