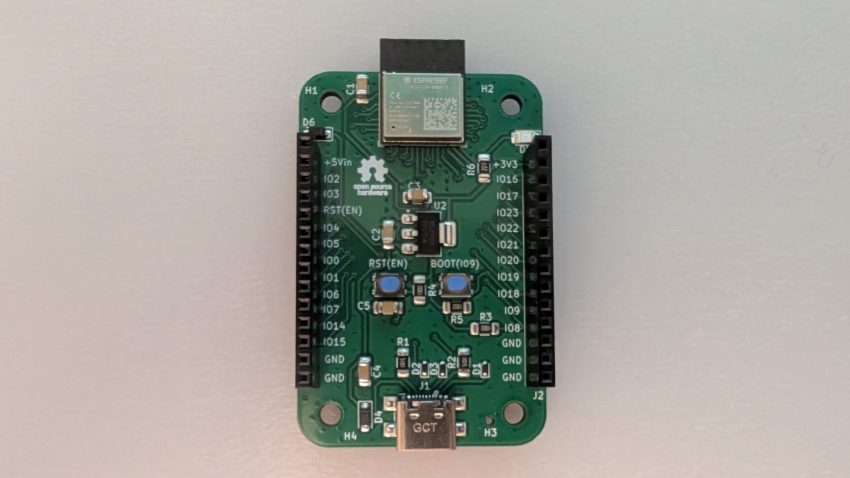
IoTLynx is a new microcontroller development board based on Espressif’s ESP32-C6 microcontroller (ESP32-C6-MINI-1module). Designed with accessibility in mind, the IoTLynx platform caters to makers, hobbyists, and newcomers to programming and electronics. Though the board supports C programming, it was specifically designed to run MicroPython—a choice that aligns with its philosophy of ease of use. With…